

서론
기존문헌 고찰
1. 지하도로 차로변경 관련 설계기준
2. 지하도로 환경에서의 운전자 행태 분석 연구
분석방법론
1. 실험장비 및 VR기반 가상 주행환경 구축
2. 분석 시나리오 설정 및 피실험자 모집
3. 주요 분석지표 설정
분석결과
1. 주요 분석지표별 기술 통계
2. 분석결과의 통계적 검정
논의 및 시사점
결론
서론
도시 교통 혼잡의 완화와 지상 공간의 효율적 활용을 위해 전 세계적으로 지하도로 건설이 활발히 추진되고 있다. 그러나 지하도로에서는 폐쇄된 공간 구조와 낮은 조도, 벽체에 의한 시거제한 등으로 인해 시각적 인지 및 판단에 직접적인 영향을 받는다. 이러한 인지적 부담은 주행 안정성 저하와 사고 위험 증가의 주요 원인으로 작용할 수 있다.
차로변경은 운전자의 판단에 따라 자발적으로 이루어질 수도 있으나, 유출연결로나 합류부 등 도로의 구조적 조건에 의해 차로변경이 불가피하게 요구되는 상황이 존재한다. 이러한 상황에서 수행되는 차로변경을 강제적 차로변경(Mandatory Lane Change)이라 한다. 지하고속도로는 터널과 달리 내부에 유출연결로가 포함된 구조를 가지며, 이에 따라 본선 주행 중 연결로 진출을 위해서 운전자는 강제적 차로변경을 수행해야 한다. 특히 지하도로에서는 제한된 시야와 낮은 조도 등의 주행환경이 운전자의 인지 지연과 주행 안정성 저하로 이어질 가능성이 크다.
현행 「지하도로 설계지침」(MOLIT, 2023)에서는 터널의 인지·수행 시간 기준을 그대로 준용하여 차로변경 허용구간을 산정하고 있다. 그러나 해당 기준은 터널과 하류부 유출연결로와의 이격거리를 충분히 확보하지 못할 경우 일시적으로 터널 내부에서 차로변경을 허용한 예외적 조건이다. 즉, 선형 주행이 기본인 터널의 일부 구간에서만 적용되도록 설정된 기준을, 지하고속도로 유출연결로의 상시적 차로변경 상황에 동일하게 적용하고 있다. 따라서 해당 기준이 지하고속도로의 실제 주행환경과 운전자의 인지 특성을 반영한 기준인지 검증할 필요가 있다.
기존 연구들은 지하환경이 운전자의 인지능력에 영향을 미치며, 심리적 부담을 증가시킨다는 점을 다양한 생리·시각 반응 분석을 통해 확인하였으나, 이러한 인지적 요인이 실제 운전행동, 특히 차로변경 시점·거리·공간 여유 등 구체적 행동 결과에 미치는 영향을 실험적으로 규명한 사례는 부족하다.
이에 본 연구는 VR 기반 주행 시뮬레이터(VR Driving Simulator)를 활용하여 지하도로 분류부 구간에서의 운전자 실제 주행행태를 정량적으로 분석함으로써, 현행 차로변경 허용구간 산정 기준의 적용 타당성을 실험적으로 검증하였다. 이를 위해 동일한 기하 구조를 가진 지상도로와 지하도로를 비교하여 환경적 차이가 운전자의 차로변경 시점 및 수행 특성에 미치는 영향을 분석하였다. 본 연구의 결과는 지하도로의 주행 특성을 반영한 차로변경 허용구간 산정 기준의 개선 방향을 제시하기 위한 근거 자료로 활용될 수 있을 것으로 판단된다.
기존문헌 고찰
1. 지하도로 차로변경 관련 설계기준
해외 지하도로의 차로변경 허용 여부에 관한 운영사례는 국내와 접근 방식에서 다소 차이가 있다. 해외에서는 차로변경을 단순한 “허용/금지”의 규제 문제가 아니라, 운전자의 인지특성에 기반한 정보 설계 및 운영 체계의 문제로 인식하고 있다. 예를 들어, 호주의 Sydney M8 및 NorthConnex와 같은 최신 지하고속도로는 전 구간에서 차로변경을 허용하는 대신, 벽면 반사도, 종단 조도, 안내표지 시인성 등 시각 정보 설계를 강화하는 방식을 채택하고 있다(National Transport Commission, 2018). 싱가포르 KPE 또한 차로변경 제한을 최소화하고, VMS·유도등 등 실시간 안내 체계를 통해 운전자의 인지부담을 완화하는 운영 전략을 적용하고 있다(LTA, 2019).
반면, 국내 지하도로는 지상도로와 달리 폐쇄된 구조와 시인성 저하로 인해 특정 구간에서만 차로변경을 허용하는 구조적 제한을 두고 있다. 「지하도로 설계지침」(MOLIT, 2023)에서도 유출연결로 접속부 설계 시 차로변경 허용구간을 별도로 산정하도록 규정하고 있으나, 이 기준은 지하도로 특성을 반영하여 새롭게 도출된 값이 아니라 터널에서 사용되던 기존 기준을 그대로 준용한 것이다.
터널의 경우 「도로교통법」 제22조에 따라 원칙적으로 차로변경이 금지되지만, 「교통노면표시 설치·관리 매뉴얼」(KNPA, 2012)은 안전 확보 및 소통 유지를 위해 필요한 경우 점선 차선을 설치하여 예외적으로 차로변경을 허용하고 있다. 이러한 배경에서 「지하도로 설계지침」(MOLIT, 2023)은 Equation 1과 같이 인지반응시간 4초, 차로변경 수행시간 10초를 적용한 차로변경 허용구간 산정식을 제시하고 있다.
여기서, : 차로변경을 위한 백색점선 설치 길이
: 인지반응 거리(m)
: 인지반응시간(4초)
: 차로변경 시간(10초)
: 설계속도(km/h)
: 방향별 차로수
이를 분리형 편도 2차로 지하고속도로(설계속도 100km/h)에 적용할 경우 인지반응거리 약 115m, 차로변경 수행거리 약 285m, 총 400m의 허용구간이 도출된다. 한편, 한국도로공사(KEC, 2012)는 기존 기준의 안전성을 보완하기 위해 “차로변경 허용구간(실선+점선)은 설계속도 100km/h 기준 최소 500m 이상 확보해야 한다며, 이는 인지·판단 지연을 고려한 터널 내 반응지연시간 가중치(α = 1.26)을 반영한 값”임을 명시하고 있다. 하지만 해당 기준은 터널과 하류부 유출연결로 간의 이격거리가 충분하지 않을 경우, 예외적으로 터널 내부에서 차로변경을 허용하기 위해 설정된 조건으로, 내부 주행 구간에서 유출연결로로 직접 진입이 이루어지는 지하고속도로의 구조적 특성과는 근본적으로 상이하다. 따라서 기존 터널 기준을 그대로 준용하는 현행 지하도로 설계 방식이 실제 운전자 행태와 부합하는지 정량적인 지표를 바탕으로 분석할 필요가 있으며, 본 연구는 이러한 문제의식을 바탕으로 시뮬레이터 실험을 통해 기준의 적용 타당성을 검증하였다.
2. 지하도로 환경에서의 운전자 행태 분석 연구
도로 설계는 단순한 기하학적 조건의 충족을 넘어, 운전자의 인지적·심리적 특성을 설계 단계에서 반영하는 인간 중심 설계(Human-Centered Design) 관점이 필수적이다(Carmody, 1997). 이는 운전자가 도로의 조도, 색채, 벽면 형태, 공간 구조 등 다양한 환경적 요인에 의해 시각 정보 처리 방식과 주의 수준이 달라지고, 이러한 운전자의 행태 차이가 주행 안정성과 안전성에 직접적인 영향을 미치기 때문이다.
특히 지하도로는 폐쇄된 구조, 낮은 조도, 벽면 반사와 시거 제한 등 지상도로와 유의미하게 다른 주행환경을 제공하며, 이러한 특성은 운전자의 인지부하와 심리적 긴장 상태를 증가시키는 것으로 보고되어 왔다(Liu et al., 2024; Yang et al., 2024). 지하도로의 밀폐된 공간은 순간적 판단력과 주의 집중도를 저하시킬 수 있으며(Lee et al., 2016), 일반적인 인지심리 실험에서도 폐쇄 환경이 인지부하와 불안감을 높여 주의력 결핍을 유발한다는 점이 확인되었다(Gamberini et al., 2013). 또한 Tang et al.(2023)은 지하 환경에서 경로 인식과 방향 감각 저하가 발생함을 시선·EEG 분석을 통해 제시하였으며, Wang et al.(2023)은 조명·천장 높이·환기 등 설계 요인이 공간적 안정감과 방향 감각 유지에 큰 영향을 미친다고 분석하였다. 이러한 제약은 설계 단계에서 반드시 고려해야 할 요소이며, 폐쇄된 환경에서의 스트레스 반응은 정보처리 속도 감소와 주의력 저하를 초래해 교통사고 위험 증가로 직결될 수 있다(Roberts et al., 2016). 이러한 인지적·심리적 부담은 지하도로에서 더욱 중요하게 다뤄져야 한다. 지하도로는 본선 내부에서 유출연결로로 진입하기 위해 필수적으로 강제적 차로변경(Mandatory Lane Change)이 발생하는 구조로 되어 있으며, 이는 시간적·공간적 제약 속에서 수행되는 고위험 주행 행동이다(Liu et al., 2018). 즉, 지하도로의 설계는 운전자의 인지적 한계와 실제 주행 행동을 직접적으로 고려해야 함에도, 현재 적용되는 기준은 이러한 운전자 특성을 충분히 반영하고 있는지 확인된 바 없다.
따라서 지하도로의 차로변경 상황에서 운전자가 어떠한 인지적·행동적 부담을 겪는지, 그리고 현행 설계기준이 이러한 운전행동을 적절히 설명하고 있는지를 실험적으로 검증하는 연구가 필요하다. 과거 지하도로에서 운전자 행태를 반영한 설계기준 연구는 상대적으로 부족했으나, 지하도로 내 분·합류부를 대상으로 운전자 행태를 반영한 설계요소 개선 방향을 제시한 연구 등(Jeong et al., 2022b; Jeong et al., 2024) 최근 주행 시뮬레이터를 활용한 연구가 점차 활발히 이루어지고 있다. 특히, Jeong et al.(2022a)은 분류부에서의 운전자의 행태를 분석하여 지하도로는 지상도로보다 낮은 주행속도가 관측되며, 터널 벽체에 상대적으로 떨어져서 주행하려는 행태를 발견하고 설계 시사점을 제시하였다. 이러한 선행연구들은 지하도로의 구조적 특성이 운전자의 주행행동에 실질적인 영향을 미친다는 점을 보여주며 운전자 행태 기반 설계요소의 개선방향을 제시하고자 하였다. 본 연구 또한 이러한 관점에서, 강제적 차로변경 상황에서 나타나는 운전자 주행행태를 분석하고 이를 반영한 설계기준 개선방향을 제시하는 것을 목표로 한다. 이를 위해 VR 기반 주행 시뮬레이터를 활용하였다.
분석방법론
1. 실험장비 및 VR기반 가상 주행환경 구축
본 연구에서는 Figure 1과 같이 서울시립대학교 교통공학과 VR실험센터에서 운영 중인 VR 기반 주행 시뮬레이터(VR Driving Simulator)를 활용하였다. 본 장비는 가상현실(VR) 기술을 적용하여 운전자가 실제 도로와 유사한 주행환경을 체감할 수 있도록 설계된 시뮬레이션 시스템으로, 다양한 도로 조건과 교통 상황을 정밀하게 구현할 수 있다. 이를 통해 피실험자가 현실감 있는 주행을 수행함과 동시에, 연구 목적에 맞는 운전행동 데이터를 정량적으로 수집할 수 있다.

기존 연구에서는 VR 기반 주행 시뮬레이터가 실제 도로의 운전행동을 높은 수준으로 재현할 수 있음이 다수 검증되었으며, 속도 선택과 감속 패턴의 유사성(Godley et al., 2002), 곡선부 주행 궤적 및 속도 조절의 타당성(Bella, 2008), 차로 유지 편차와 조향 안전성 등 핵심 주행지표의 높은 상관성(Blana, 1996)이 보고된 바 있다. 이러한 근거는 시뮬레이터가 단순 훈련 도구를 넘어 도로 설계 검증 및 교통안전 평가에 적합한 연구 플랫폼임을 뒷받침한다. 또한 시뮬레이터는 도로 표지, 기하구조, 신호체계, 교통안전시설 등 다양한 설계 요소를 현실에서 조작하기 어려운 조건에서도 반복적·정밀하게 평가할 수 있어 설계 대안의 안전성을 검증하는 데 유용하다(Fisher et al., 2011). 도로 선형 변화, 기하 요소 조정, 신호체계 변경 등 다양한 설계 요인의 영향을 분석한 사례(Farahmand et al., 2018; Rondora et al., 2022; Knodler et al., 2005)는 주행 시뮬레이터 기반 실험이 설계기준 연구에 적합한 접근임을 보여준다. 이러한 장점으로 인해 본 연구에서도 주행 시뮬레이터 환경을 활용하여 동일 기하조건에서 차로변경 허용구간을 조작하며 운전자 행태를 비교·분석하였다.
가상 주행환경은 3차원 도로 시뮬레이션 프로그램인 UC-win/Road (Ver. 17.1)을 이용하여 구축하였다. 본 프로그램은 도로의 기하구조, 설계요소, 도로시설물 및 주변 지형을 정밀하게 재현할 수 있으며, 실제 교통류 특성을 모사하는 기능을 제공한다. 또한 차량의 속도, 조향각, 횡방향 위치(Lateral Placement), 브레이크 답력 등 실제 차량의 CAN(Controller Area Network) 데이터와 동일한 형식의 주행 지표들을 실시간으로 수집·기록함으로써, 운전행동 분석의 정밀도와 신뢰성을 확보하였다.
본 연구에서는 고속도로 유출연결로 구간에서의 운전행동을 분석하기 위해, 전 차종 통행이 가능한 본선-연결로 구간의 가상주행환경을 구성하였다. 시뮬레이션은 지상도로와 지하도로 두 환경을 모두 포함하도록 설계하였으며, 동일한 기하구조 조건에서 환경적 차이에 따른 운전행동 변화를 비교할 수 있도록 하였다. 가상 도로 구조는 「도로의 구조·시설에 관한 규칙 해설」(MOLIT, 2021) 및 「지하도로 설계지침」(MOLIT, 2023)을 준용하여 구축하였으며, 실제 도로 설계기준과 동일한 제원으로 모델링하였다. 주요 설계 요소 및 적용 제원은 Table 1에 정리하였다. 모든 시나리오에서 교통류 조건은 LOS B 수준으로 설정하였다. 이는 피실험자가 차로변경 허용구간의 노면표시나 기하구조를 명확히 인식해야 하는 상황에서, 타 차량과의 상호작용으로 인해 결과가 왜곡되는 것을 방지하기 위함이다. 교통류는 이벤트 기반으로 구현하였으며, 각 시나리오에서 동일한 주행 궤적과 거동을 반복하도록 설정하여 실험의 일관성을 확보하였다. 또한 가장 일반적인 상황을 모사하기 위하여 맑은 날의 낮시간을 기준으로 설정하였다.
Table 1.
Key design elements and specifications of the scenario
2. 분석 시나리오 설정 및 피실험자 모집
기존 고찰에서 논의한 바와 같이, 현행 지하도로의 차로변경 허용구간 산정 방식은 터널에서 설정된 기준을 그대로 준용하고 있어 지하도로의 실제 운전 행태를 반영하는지가 검증되지 않은 상태이다. 이에 본 연구는 동일한 기하 조건에서 지상도로와 지하도로를 비교하고, 지하도로에서 현행 기준과 대안 기준을 함께 평가할 수 있도록 세 가지 시나리오를 구성하였다. Scenario 1(S1)은 지상도로에서 현행 기준을 적용하여 차로변경 허용구간을 400m로 설정하였다. 원칙적으로 지상에서는 터널, 교량 등의 일부 구간을 제외하고 전 구간에서 차로변경이 가능하지만, 지하도로와의 비교를 위하여 동일하게 차로변경 허용구간을 설정하고 이외 구간에서는 차로변경을 하지 못하도록 하였다. Scenario 2(S2)는 동일 기준을 지하도로에 적용하여 현행 방식의 타당성을 검토하기 위한 조건이다. Scenario 3(S3)은 반응 지연 가중치를 반영해 차로변경 허용구간을 500m로 확대한 조건으로, 터널에서 안전성을 확보하는 방안이 지하도로 환경에서도 안전성을 확보할 수 있는지 개선 효과를 검증하기 위해 설정하였다.
이를 통해 동일한 도로 구조하에서 환경 요인(지상/지하)과 설계기준 요인(400m와 500m)이 운전자의 강제적 차로변경 행태에 미치는 영향을 정량적으로 비교하였다. 먼저 S1과 S2를 비교하여 동일한 기하 조건에서 지하 환경이 운전자의 인지 및 주행 행동에 미치는 영향을 분석하였고, 이어서 S2와 S3를 비교하여 기존 터널 기준을 지하도로에 적용하는 타당성을 검증하였다. 즉, 본 연구의 시나리오 설계는 환경적 요인과 설계기준 요인을 단계적으로 분리·검증함으로써, 지하도로의 차로변경 허용구간 설정 기준을 실증적으로 평가하고 향후 기준 개선의 근거를 마련하기 위한 것이다. 시나리오의 주요 설정값은 Table 2에 제시하였다.
Table 2.
Key design elements and specifications of the scenario
| Scenario | Environment | Permission section for lane change |
| S1 | Ground | 400m |
| S2 | Underground | 400m |
| S3 | Underground | 500m |
실험 주행은 총 5km 길이의 본선 구간으로 구성하였다. 피실험자는 각 시나리오 당 1회씩 주행하였으며, 약 4.5km 구간 동안 1차로에서 정상 주행을 수행한 후, 유출연결로로 진입하기 위해 차로변경 허용구간에서 1차로에서 2차로로 1회 차로변경을 수행하였다. 이후 2차로 주행 상태에서 감속차로가 시작되는 지점에서 한 차례 추가 차로변경을 수행하여 유출연결로로 진출하였다. 또한, 각 시나리오 간에는 충분한 본선 주행 거리를 확보하여 짧은 시간 내에 연속적으로 유출연결로만 주행하는 상황이 발생하지 않도록 구성하였다. 이를 통해 각 시나리오에서 독립적인 운전행동을 유도하고, 주행 패턴의 반복으로 인한 학습효과를 방지하였다. 차로변경 허용구간, 테이퍼, 감속차로의 길이는 설계기준에 따라 동일하게 적용하였으며, 각 시나리오는 본선 차로변경 허용구간의 길이만을 변수로 설정하였다. 또한, 시나리오 간 주행 순서는 무작위로 배정하여 학습효과를 방지하였다.
본 연구의 실험에는 Table 3과 같이 총 35명의 피실험자가 참여하였다. 피실험자는 운전면허를 보유하고 운전 경력 3년 이상이며, 주 2회 이상 운전을 수행하는 성인 운전자를 대상으로 모집하였다. 20대 초보 운전자 및 시뮬레이터 멀미로 실험 수행이 어려운 고령자는 제외하였다. 최종 구성은 30대 18명(남 9명, 여 9명), 40대 11명(남 5명, 여 6명), 50대 6명(남 2명, 여 4명) 으로, 전체 성비는 남성 16명(46%), 여성 19명(54%)이었다.
Table 3.
Composition of participants
| Age group | Male | Female | Total |
| 30s | 9 | 9 | 18 |
| 40s | 5 | 6 | 11 |
| 50s | 2 | 4 | 6 |
| Total | 16 | 19 | 35 |
3. 주요 분석지표 설정
1) 차로변경 인지완료지점 및 종료지점
본 연구에서는 강제적 차로변경(Mandatory Lane Change, MLC) 과정에서 운전자의 주행 행동을 정량적으로 분석하기 위해, 차로변경의 시작지점(Start Point, SP)과 종료지점(Completion Point, CP)을 정의하였다.
SP는 차량 중심이 원래 차로의 우측 차선과 일치하는 시점으로, 실제 차로 이동이 개시되는 순간을 의미한다. CP는 차량 중심이 목표 차로의 중심선과 일치하는 시점으로, 차로변경이 완전히 완료된 상태를 나타낸다.
2) 차로변경 소요거리(Lane Change Distance, LCD)
차로변경 소요거리(Lane Change Distance, LCD)는 운전자가 실제로 차로 간 이동을 완료하는 데 사용한 물리적 거리를 의미한다. 이는 차로변경 수행 과정의 공간적 특성을 나타내는 지표로, 값이 작을수록 차로변경이 급박하게 수행되었을 가능성을 시사한다.
여기서, LCD = 차로변경 소요거리
CP = 차로변경 종료지점
SP = 차로변경 시작지점
3) remaining distance(RD)
본 연구에서는 강제적 차로변경(Mandatory Lane Change, MLC) 상황에서 운전자의 행동 긴박성과 위험 노출도를 정량적으로 평가하기 위해 remaining distance(RD) 개념을 도입하였다. Figure 2와 같이 RD는 차로변경이 완료된 이후 차량이 목표 지점(예: 분류부, 출구 진입지점)에 도달하기까지 남아 있는 거리로 정의된다. 즉, 운전자가 차로변경을 마친 뒤 추가적인 주행 조작을 수행할 수 있는 공간적 여유 거리(spatial margin)를 의미한다.
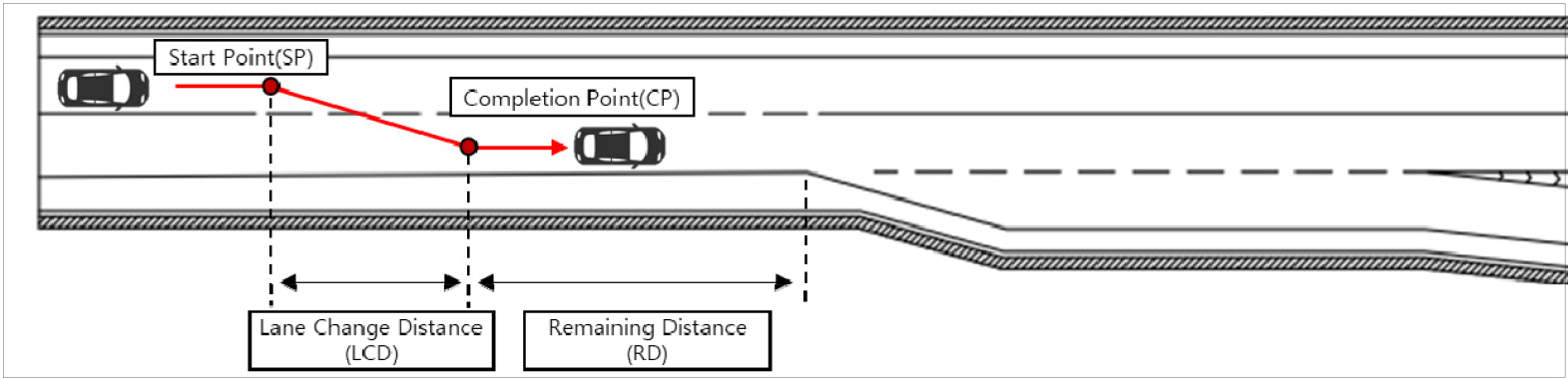
운전자의 인지 지연 또는 교통 상황에 따른 착수 지연이 발생할 경우, RD는 짧아지며 이는 판단 부담 증가 및 조향·가감속 조작 여유의 감소로 이어진다. 이러한 거리 축소는 결과적으로 운전자의 위험 노출 가능성을 높인다. 기존 연구에서는 강제적 차로변경 시 운전자가 직면하는 시간적·공간적 제약을 언급하였으나(Pan et al., 2016; Wang et al., 2019), 이를 구조화된 거리 지표로 정의하고 위험성과의 관계를 실험적으로 검증한 사례는 제한적이었다. 본 연구에서는 이러한 한계를 보완하기 위하여 RD를 Equation 3 같이 정의하였다.
여기서, = 차로변경 허용구간 연장
SP = 차로변경 시작지점
LCD = 차로변경 소요거리
분석결과
본 연구에서 수집된 주행 시뮬레이터 데이터에는 차량의 속도, 위치, 가속도, 제동값 등이 포함되며, 모든 변수는 0.001초 간격으로 자동 기록되었다. 수집된 원시데이터는 거리 기반의 분석이 가능하도록 재구성하였다. 시간 단위의 연속 데이터를 1m 간격으로 보간하여 균등한 공간 단위 데이터로 변환하고, 이상치 제거 및 구간별 연속성 검증을 수행하였다.
이후, 차로변경 허용구간의 시작점을 기준으로 거리를 0m로 정렬한 뒤, 각 실험별로 SP와 CP를 추출하였다. 이를 바탕으로 피실험자별 LCD와 RD를 산출하여 후속 통계 분석의 입력값으로 활용하였다.
1. 주요 분석지표별 기술 통계
본 절에서는 시나리오별 주요 주행 지표의 분포 특성과 경향을 파악하기 위하여 기술 통계 분석을 수행하였다. 이는 지상도로와 지하도로 환경에서 운전자의 인지–판단–행동 단계별 차이를 정량적으로 비교하기 위한 기초 분석으로, 이후 수행되는 분산분석(ANOVA)을 통한 통계적 유의성 검증의 기반이 된다. Table 4는 시나리오별 주요 변수에 대한 기술통계 결과를 제시한 것이다. 모든 변수는 거리 단위(m)로 산정하였으며, 평균, 표준편차, 최솟값, 최댓값을 포함하였다.
Table 4.
Descriptive statistics of key analytical indicators
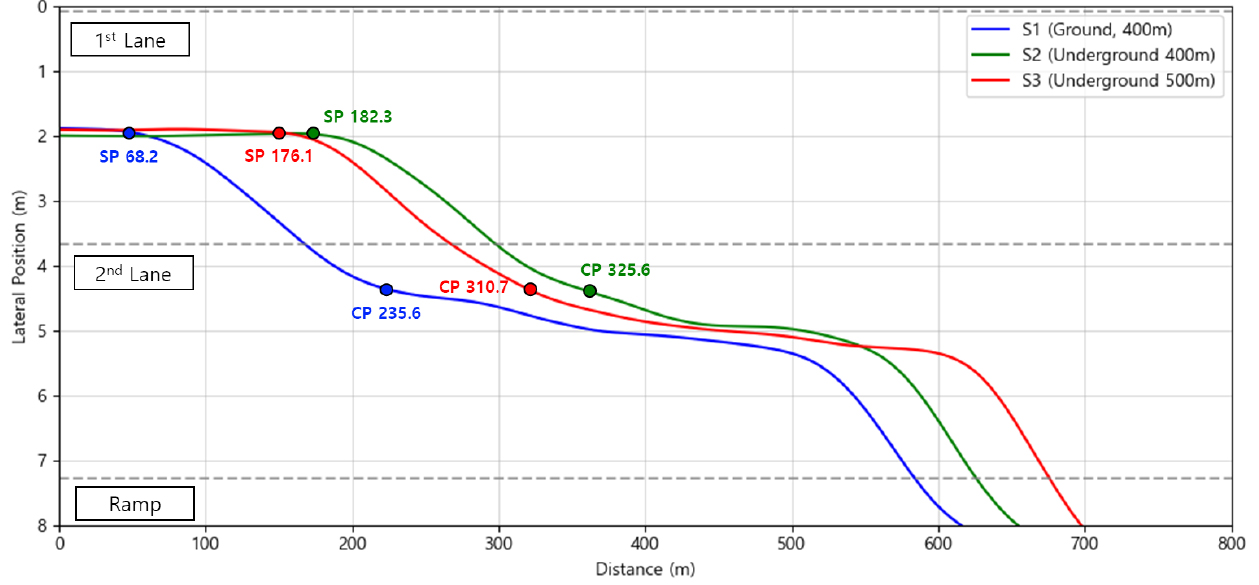
지상 환경(S1)에서 운전자의 차로변경 시작지점(SP)은 Figure 3과 같이 평균 68.2m로, 현재 설계기준의 인지반응거리(약 115m) 이내에서 차로변경을 개시하였다. 반면 지하 환경에서는 S2 조건에서 182.3m, S3 조건에서 176.1m로 각각 114.1m 및 107.9m 후행하여, 모든 운전자가 인지반응거리 115m 이후에 차로변경을 시작한 것으로 나타났다. 즉, 지하도로에서는 현행 인지반응거리 기준 내에 차로변경을 착수하지 못하는 것으로 확인되었으며, 이는 지하 환경의 시야 제한과 낮은 조도 등이 운전자의 판단 착수를 지연시킨 결과로 해석된다. CP는 S1에서 평균 235.6m, S2에서 325.6m, S3에서 310.7m로, 지하도로 조건에서 약 90m 이상 후행하였다. 이는 SP가 늦어짐에 따라 실제 차로변경 완료 시점까지 일관되게 지연된 것으로 해석된다.
LCD는 S1에서 158.0m, S2에서 201.7m, S3에서 199.6m로, 지하 환경에서 약 40m가량 더 긴 거리에서 수행되었다. 그러나 모든 시나리오에서 LCD가 현재 설계기준에서 제시하는 차로변경 수행거리(285m)보다 짧게 나타나, 실제 차로변경 수행 자체에는 물리적 제약이 없는 것으로 확인되었다. RD는 S1에서 평균 164.4m, S2에서 74.4m, S3에서 189.3m로 분석되었다. 지하 400m 조건(S2)에서는 지상 대비 약 90m 이상 감소하여, 차로변경 완료 후 운전자가 확보할 수 있는 공간적 여유가 현저히 축소되었다. 반면 500m 확장 조건(S3)에서는 RD가 189.3m로 회복되어 지상 수준을 약 25m 상회하였다. 이는 기존 400m 기준이 지하도로 운전행동의 인지 지연 특성을 충분히 반영하지 못함을 보여주며, 차로변경 허용구간을 500m 수준으로 확장할 경우 주행 안정성이 실질적으로 향상될 수 있음을 시사한다.
2. 분석결과의 통계적 검정
앞서 기술 통계에서 확인된 바와 같이, 지하도로 환경(S2, S3)에서는 SP와 CP가 지상도로(S1)에 비해 후행하는 경향을 보였다. 이러한 차이가 단순한 평균의 차이에 그치는지, 또는 통계적으로 유의한 수준의 차이를 보이는지를 검증하기 위하여 일원 배치 분산분석(One-way ANOVA)을 수행하였다. 또한, ANOVA에서 유의성이 확인된 변수에 대해서는 Tukey의 HSD(Honestly Significant Difference) 검정을 시행하여 시나리오 간 구체적인 차이를 비교하였다. 이 분석은 기술 통계로 관찰된 지상–지하 환경 간 차이를 통계적으로 검증함과 동시에, 차로변경 허용구간의 확장(S2→S3)이 운전행동 개선에 미치는 영향을 정량적으로 평가하기 위한 것이다. Table 5는 각 변수에 대한 ANOVA와 사후검정 결과를 제시한 표로서, 비교 쌍의 평균차(Mean Difference), 유의확률(p-value), 및 유의성 여부(α = 0.05 기준)를 함께 나타내었다.
Table 5.
Tukey HSD post-hoc test result of key analytical indicators
SP는 시나리오 간 통계적으로 유의한 차이를 보였다(F = 9.48, p < 0.001). 사후검정 결과, 지상 환경(S1)은 지하 환경(S2, S3) 모두와 유의한 차이를 나타냈으며(S1–S2: p < 0.001, S1–S3: p = 0.004), 이는 지하도로에서 운전자의 차로변경 판단 및 착수 시점이 명확히 후행함을 의미한다. 반면, S2–S3 간의 차이는 통계적으로 유의하지 않아(p = 0.373), 착수 지연은 차로변경 허용구간의 길이보다는 지하도로 환경 자체의 시각적·인지적 제약에 기인한 것으로 해석된다. CP 역시 시나리오 간 유의한 차이가 나타났다(p < 0.001). 지상 조건(S1)에 비해 지하 400m 조건(S2)과 500m 조건(S3)에서 종료 시점이 각각 98.5m, 82.1m 후행하였으며(S1–S2: p < 0.001, S1–S3: p < 0.001), 이는 지하 환경에서 운전자의 차로변경 수행이 지연됨을 의미한다. 반면, S2–S3 간 차이는 유의하지 않아(p = 0.676), 허용구간의 확장이 착수 이후의 조향 수행 단계에는 직접적인 영향을 미치지 않는 것으로 나타났다.
LCD는 시나리오 간 차이가 통계적으로 유의하지 않았다(F = 3.03, p = 0.054). 지상 조건(S1)에 비해 지하 400m 조건(S2)과 500m 조건(S3)에서 각각 45.3m 및 43.3m 증가하였으나, 두 차이 모두 유의하지 않았다(p > 0.05). 이는 환경 변화에 따라 착수 시점과 종료 시점의 절대 위치는 변하더라도, 운전자가 실제 차로변경에 소요하는 거리 자체는 큰 차이가 없음을 의미한다. 즉, 인지 및 판단의 지연에도 불구하고 운전자는 일정한 거리 내에서 차로변경을 완료하려는 보상적 주행행동(compensatory behavior)을 보이는 것으로 해석된다. 차로변경 완료 이후 확보되는 RD는 세 시나리오 간 통계적으로 매우 유의한 차이를 보였다(F = 20.96, p < 0.001). 지상 조건(S1)에서 평균 164.4m였던 RD는 지하 400m 조건(S2)에서 74.4m로 급감하였으나, 허용구간을 500m로 확대한 S3에서는 189.3m로 회복되어 지상 조건과 거의 동일한 수준(p = 0.628)을 보였다.
이는 지하도로의 시야 제한과 인지 지연으로 인해 주행 여유 공간이 감소하지만, 허용구간의 확장(400m → 500m) 이 이러한 공간적 불이익을 실질적으로 완화함을 정량적으로 입증한다. 즉, 인지 및 판단의 지연이 불가피한 지하도로 환경에서도, 설계기준의 조정을 통해 주행 안정성과 안전성을 향상시킬 수 있음을 확인하였다.
논의 및 시사점
앞선 분산분석 결과에서 확인된 바와 같이, 지하도로 환경에서는 차로변경의 착수 및 완료 시점이 지연되고, 이에 따라 RD가 감소하는 경향이 나타났다. 이를 구조적으로 검증하기 위해 주요 지표 간 상관관계를 분석하였다. 분석에는 시작지점(SP), 종료지점(CP), 차로변경 소요거리(LCD), RD를 포함하였으며, Pearson 상관분석을 수행하였다(α = 0.05). 분석 결과는 Figure 4에 제시된 바와 같다. SP와 CP 간에는 r = 0.68 (p < 0.001)로 강한 양의 상관이 나타나, 차로변경의 착수가 늦어질수록 종료 또한 후행함을 보여준다. 반면, SP와 LCD 간에는 r = –0.55 (p < 0.001)의 유의한 음의 상관이 나타나, 착수가 늦을수록 차로변경을 급박하게 완료하는 경향이 확인되었다. SP와 RD 간 상관은 r = –0.63 (p < 0.001)로, 늦게 착수할수록 차로변경 완료 후 확보 가능한 주행 여유가 감소함을 의미한다. 특히 CP와 RD 간에는 r = –0.87 (p < 0.001)의 매우 강한 음의 상관이 나타나, 차로변경 종료가 늦어질수록 남은 주행거리가 급격히 축소됨을 정량적으로 입증하였다. 한편, LCD와 RD 간 상관은 r = –0.16 (p = 0.117)로 유의하지 않아, 차로변경 수행거리 자체보다는 착수 및 종료 시점이 결과적 공간 여유(RD)에 더 큰 영향을 미치는 것으로 나타났다.
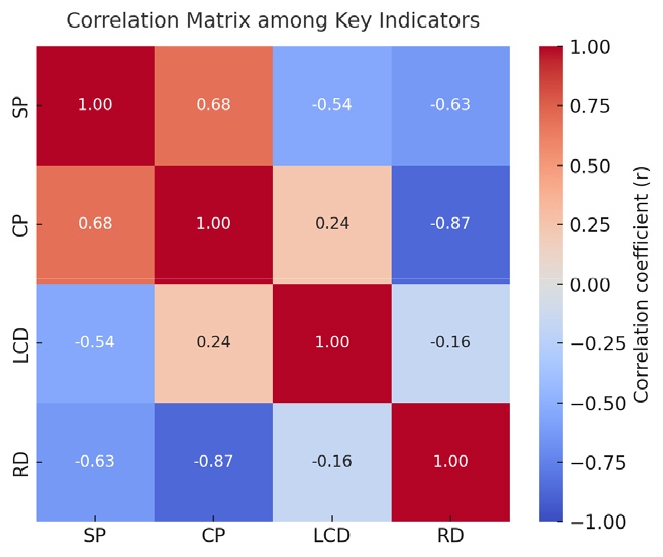
요약하자면, 운전자의 차로변경 지연은 수행 거리(LCD)보다는 결과 변수인 RD에 직접적인 영향을 미친다. 즉, 지하도로와 같은 제한된 시야 환경에서는 인지·판단 단계의 지연이 이후 조작 및 주행 여유의 감소로 이어지는 구조적 관계가 통계적으로 확인되었다.
본 연구의 분석 결과, 지하도로의 제한된 차로변경 환경은 운전자의 인지 및 주행행태에 실질적인 영향을 미치는 것으로 나타났다. 이러한 결과는 지하도로의 설계 및 운영체계 전반에서 운전자의 인지적 특성과 공간적 제약을 통합적으로 고려해야 함을 보여준다. 특히 본 연구는 지하도로의 강제적 차로변경 구간을 대상으로 실험적 검증을 수행함으로써, 현행 설계기준의 타당성을 검토하고 차로변경 허용구간 운영 기준의 개선 방향을 정량적으로 제시했다는 점에서 의의가 있다.
설계적 측면에서, 지하도로의 분류부 구간에서는 지상도로보다 긴 인지·판단 반응시간을 반영한 차로변경 허용구간 설정이 필요하다. 현행 「지하도로 설계지침」(MOLIT, 2023)의 기준은 터널 환경을 전제로 도출된 값으로, 실제 지하도로의 시야 제약 및 복합적 분기 구조를 충분히 반영하지 못한다. 본 연구 결과에 따르면, 인지 지연을 보정하기 위해 500m 이상의 차로변경 허용구간이 필요하며, 이는 단순한 거리 확장이 아니라, 운전자의 시야 확보와 시각적 인지 범위를 개선하기 위한 구조적 설계와 병행될 필요가 있다. 예를 들어, 곡선 반경 완화나 벽면 색채 대비 조정이 운전자의 시야 인지 및 주행 안정성 향상에 기여한다는 연구 결과(Lee et al., 2016; Wang et al., 2023)를 고려할 수 있다. 운영적 측면에서는 정보 제공 체계의 개선이 요구된다. 운전자가 차로변경 허용구간의 시작을 조기에 인식할 수 있도록, 조기 유도차선, 가변 정보표지, 동적 경고 시스템 등 지하환경에 특화된 안내 체계를 구축해야 한다. 이러한 체계는 운전자의 시각적 인지 지연을 완화하고 판단을 선행적으로 유도함으로써 급박한 조작을 예방할 수 있을 것으로 기대된다. 정책 및 연구적 측면에서는 차로변경 허용구간의 설계를 정량적 지표에 기반해 평가할 수 있는 체계로의 전환이 필요하다. 본 연구에서 제시한 RD 지표는 차로변경 완료 후의 주행 안정성을 평가할 수 있는 유용한 기준으로, 향후 인지반응시간·시선 행태·생리적 부하 등을 통합한 위험도 기반 설계 모델로 발전시킬 수 있다. 이를 통해 설계 단계에서부터 운전자의 인지적 한계와 실제 주행 위험을 동시에 반영할 수 있을 것이다.
결론
본 연구는 지하도로 분류부 구간에서 운전자의 실제 차로변경 행태를 실험적으로 분석하여, 현행 차로변경 허용구간 기준의 적정성을 검증하였다. 지하도로는 지상도로보다 낮은 주행속도가 관측되는 것을 선행연구에서 검토되었으며, 이러한 속도와 운전환경의 차이로 인하여 동일한 기준을 적용하는 것은 문제가 있다. 실제로 본 실험에서 주행 시뮬레이터를 활용하여 분석한 결과, 지하도로 환경에서는 차로변경 허용구간의 시작을 늦게 인식하고 이에 따라 착수 시점이 후행하였으며, 그 결과 차로변경 완료 이후의 RD가 현저히 감소하는 것으로 나타났다.
반면, 인지 지연을 고려하여 차로변경 허용구간을 500m로 확대한 조건에서는 RD가 지상 환경과 유사한 수준으로 회복되어, 현행 기준(설계속도 100km/h 기준 인지반응시간 4초와 차로변경 수행시간 10초를 적용하여 산정된 400m)이 실제 운전행동을 충분히 반영하지 못함을 확인하였다. 이는 지하도로의 차로변경 허용구간이 터널 설계 기준을 단순 준용할 경우, 운전자의 인지·판단 지연 특성을 반영하지 못해 주행 여유가 부족해질 수 있음을 실증적으로 보여준다. 차로변경 허용구간 500m 조건을 역산한 결과 운전자가 실제로 요구하는 인지반응시간은 현행 기준에서 가정한 약 4초보다 약 두 배 긴 8초 수준으로 나타났다. 이러한 결과는 지하도로 환경에서 시야 제약과 정보 인식 지연으로 인해 운전자의 판단·조작 여유시간이 현행 설계기준보다 현저히 길게 요구됨을 의미한다. 따라서 지하도로의 차로변경 허용구간은 고정된 거리 기준(400m)이 아니라, 운전자 인지반응 특성을 반영한 시간 기반 설계체계로 재산정되어야 하며, 본 연구는 그 정량적 근거를 실험적으로 제시하였다.
향후 연구에서는 최근 증가하고 있는 소형차전용 지하도로의 특성을 반영하기 위해, 본 연구에서 분석한 전차종 기준 지하도로(시설한계 4.5m)와 소형차 전용도로(시설한계 3.3m) 간 운전자 차로변경행태의 차이를 비교·검증하는 연구가 요구된다. 이는 동일한 기하 조건에서도 차량 크기·차폭 여유·벽면의 영향이 운전자 인지와 차로변경 전략에 미치는 영향을 규명하는 데 기여할 것이다. 또한 본 연구에서는 인지반응시간을 중심으로 행태 차이를 분석하였으나, 강제적 차로변경 과정에서는 차로변경 수행시간(Lane Change Time) 또한 중요한 행태 요소로 작용한다. 따라서 향후 연구에서는 인지반응시간뿐 아니라 차로변경 수행시간, 차로이동 속도, 조향 패턴 등 미시적 운전 행태를 세분화하여 파라미터로 구축하고, 이를 미시적 교통 시뮬레이션에 적용하여 차로변경 허용구간 길이가 교통류 안전성 및 소통성에 미치는 영향을 정량적으로 분석할 필요가 있다. 이러한 접근은 개별 운전자 반응을 교통류 수준에서의 설계기준 타당성 평가로 확장하는 데 중요한 단계가 될 것이다. 마지막으로 시뮬레이터 기반의 통제된 환경은 실제 교통류 상호작용이나 주변 시각 정보의 변화를 완전히 반영하지 못하는 한계가 있으므로, 향후에는 실도로 주행 실험 또는 혼합현실 기반 시뮬레이션을 활용하여 다양한 주행 조건에서 운전자 행태를 추가 검증할 필요가 있다. 이를 통해 본 연구에서 제시한 행태 기반 설계요소의 현실적 적용성을 보다 정밀하게 평가할 수 있을 것이다.
종합하면, 본 연구는 지하도로에서의 인지 지연과 차로변경 여유거리 축소라는 핵심 행태적 특성을 실험적으로 규명하고, 차로변경 허용구간 기준의 재검토 필요성을 제시하였다. 향후 제시된 연구과제가 추가적으로 수행된다면, 본 연구의 결과는 지하도로 설계기준 개정에 활용할 수 있는 정량적 근거자료로서 활용될 것으로 기대된다.
