

서론
선행연구 및 동향
1. 자율주행 협력인프라 및 운행평가 연구
2. 자율주행환경의 IoT 교통안전시설 개발 추진배경
분석방법론
분석결과
1. 시나리오: 자율주행차 도입비율에 따른 결과
2. 시나리오: IoT 교통안전시설이 있을 때, 자율주행차 도입비율에 따른 결과
3. 비교분석
결론
서론
우리나라는 2027년 레벨4 자율주행차 상용화를 목표로 「미래자동차 산업발전전략 2030년 국가로드맵(Government, 2019)」을 수립하고 정부차원에서 연구를 수행하고 있다. 자율주행차의 발전과 상용화를 위해 핵심 인프라, 제도, 서비스 등을 단계적으로 정비하고 미래자동차 시대를 준비하기 위한 산업생태계를 지원하고자 수립한 정책이며, 자율주행차의 제작/성능검증/보험/보안체계와 관련된 법 ‧ 제도와 핵심인프라를 2024년까지 구축완료하는 것이 목표이다. 경찰청은 자율주행차가 도로에서 안전하게 운행할 수 있도록 「자율주행차의 도로주행을 위한 운행체계 및 교통인프라 연구개발 사업(2019-2021)」을 진행하고 있으며 올해는 개발의 마지막 단계이다. 그 중 「IoT 기반 교통안전시설 정보제공 및 운영관리 기술개발 사업(3과제)」을 수행하고 있는데 도로상의 교통안전시설을 자율주행차가 인식할 수 있도록 통신기반의 IoT교통안전시설을 개발하는 것이다. 대부분의 자율주행차가 교통안전시설을 차량내에 센서를 통해 영상으로 수집하는 것과 달리 IoT교통안전시설은 통신으로 교통안전시설의 정보를 제공하는 것인데 이는 교통안전시설의 노후화와 훼손상태를 고려할 필요가 없어 안전성과 정보정확도 측면에서 기대가 높다. 본 연구는 이러한 배경하에 IoT교통안전시설이 도심부도로에 설치될 경우, 도로네트워크의 효율성과 안전성 측면에서 어떻게 변화하는지를 분석하는데 목적이 있다. 따라서 IoT 교통안전시설이 설치된 판교 자율주행시범 운행지구를 대상으로 미시적 교통시뮬레이션 프로그램인 VISSIM 11.0을 활용해 현장의 네트워크를 구축하고, IoT 교통안전시설 유무에 따라 자율주행차 운행비율을 달리하였을 때 자율주행차에 보내는 속도제한 정보에 따른 도로상의 효율성과 안전성을 검토하고자 한다.
선행연구 및 동향
1. 자율주행 협력인프라 및 운행평가 연구
본 연구의 목적이 IoT 교통안전시설 설치 후 도로네트워크의 효율성과 안전성을 검토하는 것이므로 자율주행 협력인프라 및 운행평가 연구를 중심으로 기존 연구를 정리하고 본 연구의 차별성을 검토하였다.
자율주행 협력인프라 관련 연구로 Kim et al.(2020)은 차량센서와 도로인프라 정보를 바탕으로 공사구간 회피가 가능한 자율협력주행 시스템 알고리즘을 설계하였다. Song et al.(2021)은 인프라와 자율주행시스템간 교통정보협력을 통한 자율주행 서비스 시나리오를 개발하고, 이에 필요한 통신 프로토콜 및 협력형 시스템을 제안함으로써 인프라 연계 자율주행의 실효성을 검증하였다. Oh and Yoon(2017)은 자율주행차량 도입을 위한 대응 단계를 구분하고, 단계별 첨단도로인프라의 전략적 대응방안을 제시하였다. Kim(2021)은 자율주행 교통환경에서 운영가능한 교차로 신호운영시스템 동향 검토를 통해, 자율주행차 기술개발속도와 보급속도에 맞추어 단계적인 교차로운영시스템이 필요하다고 제안하였다. So and Moon(2018)은 V2X 무선통신이 포함된 인프라 시스템의 개발 및 표준동향 검토를 통해, V2X 인프라는 실시간 도로교통상황에 대한 정보를 운전자와 차량에 전달할 수 있으므로, 도로교통체계의 안전성을 증진시킬 수 있을 것이라고 주장하였다. Outay et al.(2019)은 V2V 및 V2I통신을 기반으로 차량이 위험구간에 접근할 때 차량들에 경고메시지를 전달하는 협력주행 알고리즘을 설계하였다. Ubiergo and Jin(2016)은 V2I통신이 신호교차로의 이동성 및 환경을 개선하는지 검토하였으며, 분석결과 V2I통신은 통행지연을 15%, 연료소비 및 온실가스 배출량을 약 8% 절감시키는 것으로 나타났다. 위의 연구들은 자율주행차량의 안전한 주행을 위해서는 그에 상응하는 도로 및 교통시설인프라가 필요함을 시사한다.
자율주행차 운행평가 관련 연구는 자율주행차 도입효과에 관한 연구와 자율주행차 도입 비율에 따른 네트워크 평가 연구로 구분할 수 있으며, 대부분 시뮬레이션으로 가상의 네트워크를 설계하여 평가하였다. 자율주행차 도입효과에 관한 연구로 Kang et al.(2019)은 VISSIM 차량추종모델 Wiedemann99를 활용해 고속도로 진출입구간을 대상으로 레벨4 자율주행차 도입효과 및 교통류 영향을 검토하였으며, 교통류의 서비스 수준이 낮을수록 자율주행차의 도입효과가 큰 것으로 나타났다. Lee et al.(2018)은 자율주행차의 주행특성을 반영한 자율주행강도라는 개념을 정의하고, VISSIM 차량추종모델인 Wiedemann99를 적용하여 자율주행강도에 따른 운영효율성과 도로안전성을 평가하였다. 분석결과 교통량이 많고 교통류가 원활하지 않을경우 차두거리와 차로변경을 위한 수락간격이 짧을수록 안전성이 저하되므로, 교통류 흐름에 따라 적정한 차두거리와 차로변경을 위한 수락간격을 적용해야 한다고 주장하였다. Seo et al.(2020)은 VISSIM을 활용해 자율주행차의 최적경로탐색 시스템의 도입 전후 효과분석을 실시하였으며, 개선효과를 확인하였다. Tafidis et al.(2019)은 자율주행차 도입에 따른 자전거 운전자의 안전성 효과분석을 VISSIM을 활용해 분석하였으며, 자율주행차의 도입은 자전거 운전자의 안전성을 향상시키는 것으로 나타났다. Lu et al.(2020)은 자율주행차의 도입이 도심부 네트워크의 교통류에 어떠한 영향을 주는지를 연구했는데 자율주행차는 일반차량에 비해 교통류의 흐름을 16-23% 증가시키는 것으로 나타났다.
자율주행차 도입비율에 따른 네트워크 평가 연구로 Yook et al.(2018)은 자율주행차량 도입률에 따른 네트워크의 효율성 변화를 검토하였으며, 그 결과 연속류 도로가 자율주행차의 교통상황 개선효과가 크며, 자율주행차 도입률이 높아질수록 교통류 개선효과가 더 커지는 것으로 나타났다. Morando et al.(2017)은 VISSIM과 SSAM을 활용해 자율주행차의 안전 성능을 신호교차로와 회전교차로 환경에서 평가하였다. 분석결과 회전교차로는 자율주행차 비율 100%일 경우 상충횟수가 29-32% 감소하며, 신호교차로는 자율주행차 비율에 따라 상충횟수가 20-47% 감소하였다. Park et al.(2017)은 VISSIM 차량추종모델 Wiedemann74를 활용해 교통혼잡도와 속도제어를 고려한 자율주행환경을 구현하였으며, 분석결과 자율주행차 비율이 높아 질수록 도로 혼잡이 신속하게 제거되었으며, 회복시간 측면에서는 교통체증을 해소하기 위해서는 10-20km/h사이의 적절한 감속이 필요하다고 주장하였다.
자율주행차의 운행평가와 관련한 대부분의 선행연구는 도심부도로가 아닌 고속도로와 같은 연속류도로에서의 효율성을 평가하였다. 또한 대부분 자율주행차가 운행했을 때의 네트워크 효율성에 대한 평가로 도로인프라와 자율주행차를 연계한 효율성과 안전성에 대한 연구는 아직 부족한 실정이다. 따라서 본 연구는 IoT 교통안전시설을 도심환경도로에 설치하였을 때 자율주행비율에 따라 도로네트워크가 어떻게 변화하는지 효율성과 안전성측면에서 평가한다.
2. 자율주행환경의 IoT 교통안전시설 개발 추진배경
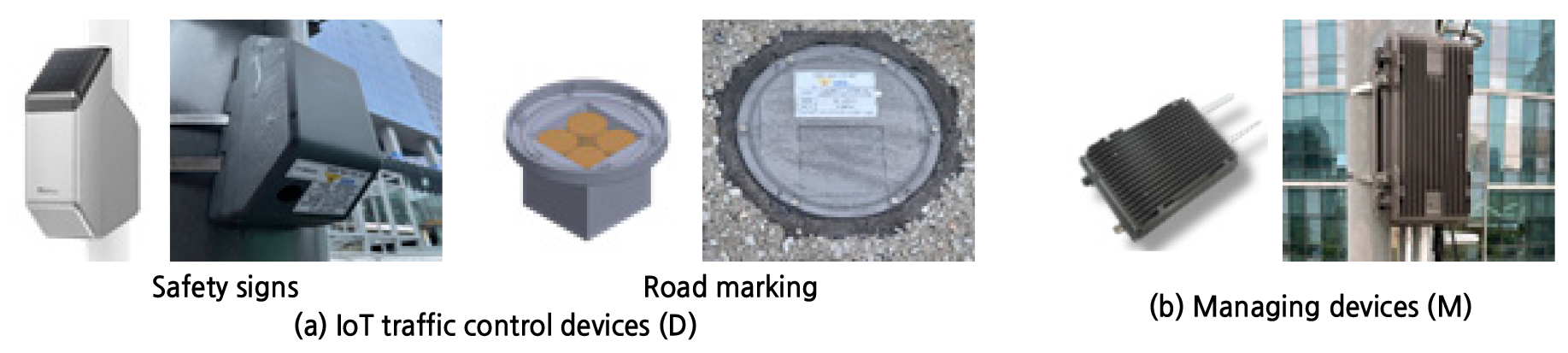
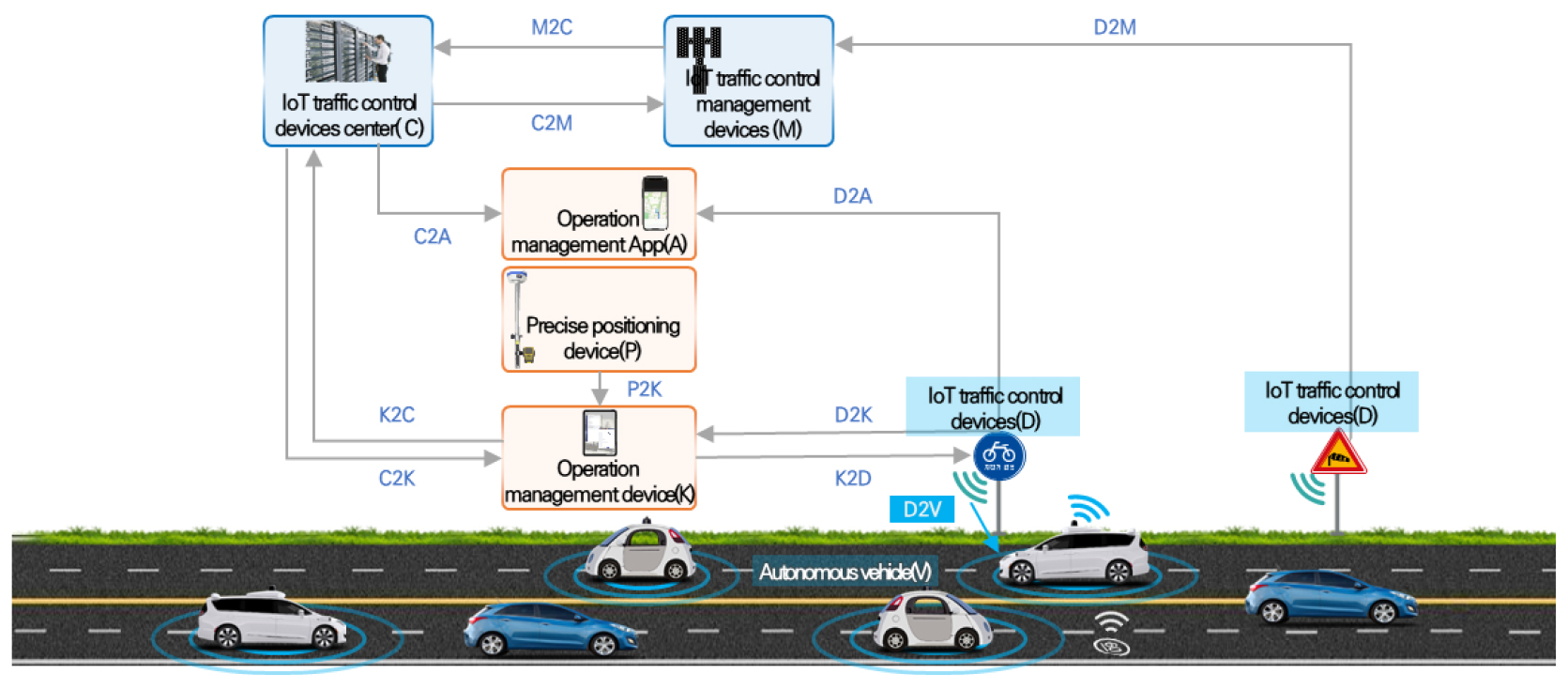
경찰청은 자율주행차의 안전한 실도로 운행을 지원하기 위해 「자율주행차의 도로주행을 위한 운행체계 및 교통인프라 연구개발 사업(2019-2021)」을 진행 중에 있다. 교통안전시설 관련 연구로는 「IoT 기반 교통안전시설 정보제공 및 운영관리 기술개발 사업(3과제)」이 진행되고 있으며, 사물인터넷(Internet of Things, IoT)기술을 교통안전시설에 접목하여 자율주행차가 센서만으로 수집하기 어려운 교통안전시설 정보를 통신을 기반으로 정보를 제공하며, 센터시스템을 통해 교통안전시설 정보를 실시간 운영관리한다. 이를 위해 교통안전시설 정보를 제공하는 IoT교통안전시설(D), IoT교통안전시설을 관리하는 통합관리장치(M), 설치된 모든 IoT교통안전시설 및 통합관리장치를 관리하는 운영관리센터(C), IoT교통안전시설을 신규설치하고 유지보수하기 위한 현장관리장비(K), 마지막으로 IoT교통안전시설 정보를 수집하는 차내장치(V)를 개발하였다. IoT교통안전시설은 지주에 부착하는 형태의 안전표지와 도로에 매설하는 노면표시로 구분되며 현장설치모습은 Figure 1, 개발된 장치들의 통신개요도는 Figure 2에 제시하였다. IoT교통안전시설(D)과 차내장치(V)의 D2V통신, IoT교통안전시설(D)과 통합관리장치(M)의 D2M통신은 LoRa(Long Range)통신을 적용하였다. LoRa 통신은 최소한의 전력소모로 높은건물 등 통신장애물이 없을경우 10km 이상 통신이 가능하며 기지국이나 장비없이 기기에 칩을 접목해 데이터 송수신이 가능하고, 5G나 LTE통신에 비해 인프라 구축 및 유지관리 비용이 적다는 장점이 있다. D2V통신으로 IoT교통안전시설 300m반경으로 접근하는 차내장치에 10초 주기로 교통안전시설 정보를 제공하며, D2M통신으로 통합관리장치는 400m반경 내 위치한 IoT교통안전시설의 정상작동여부에 대한 정보를 10분 주기로 수집한다. 2021년은 본 사업의 개발을 위한 마지막해이며 향후 실용화를 위해 교통규제심의에 상정 계획에 있다.
분석방법론
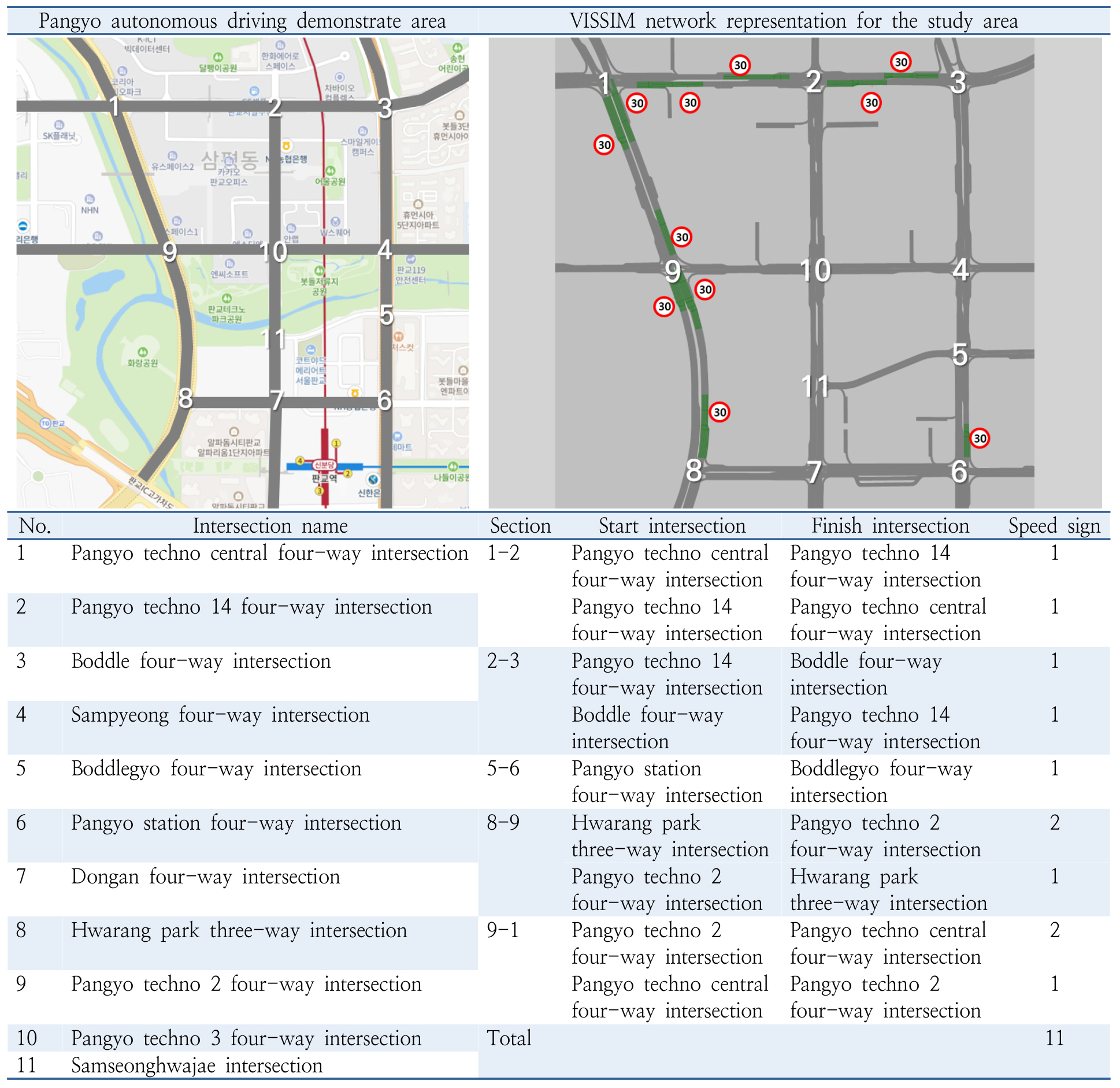
판교자율주행 실증단지는 2021년 4월 자율주행시범운행지구로 지정되었다. 경기기업성장센터↔제1판교테크노밸리 7.0km구간이며 여객의 유상운송 규제특례를 부여받아 2021년 하반기부터 수요응답형 유상운송 및 정규셔틀서비스를 제공할 계획이다. 또한 대상구간은 2021년 7월 IoT교통안전시설 현장실증을 실시한 바 있다. 본 연구의 대상은 판교 자율주행시범운행지구내 11개 교차로를 선정하였으며, Figure 3과 같다.
선정된 교차로를 대상으로 미시적교통시뮬레이션 프로그램 VISSIM을 활용해 네트워크를 구축하였다. 시뮬레이션으로 현장의 교통량 등을 입력한 후 시뮬레이션 한 결과가 실제 현장을 반영한다는 것을 확인하기 위하여 독립표본 t-검정을 실시하였다. VISSIM에서는 교통류의 흐름을 모형화 하기위한 방법으로 차량추종모형을 단속류(Wiedemann74 car-following)와 연속류(Wiedemann99 car-following)로 구분하여 시뮬레이션에 적용하고 있으며, 이외에도 차로변경행태(lane change behavior)를 조정하여 운전자특성을 반영할 수 있다(Yook et al., 2018). 본 연구의 분석대상지는 도심지역이기 때문에 차량추종모형은 단속류모형(Wiedemann74 car-following)을 적용하였으며, 자율주행 운행행태를 반영하기 위해 자율주행차 파라미터값을 Table 1과 같이 조정하였다. 자율주행차의 파라미터는 기존연구 Park et al.(2017), Lee et al.(2018)을 참고해, 자율주행차량의 추가안전거리는 1.5m, 증가안전거리는 2.5m, 안전거리 감소요인은 0.3m로 일반차량보다 짧게 설정하였는데, 이는 자율주행차는 일반적인 사람의 인지반응시간 보다 빠르게 반응하기 때문에 차량간 안전거리를 일반차량보다 단축할 수 있기 때문이다(Park et al., 2017). 또한 일반차량의 속도분포는 VISSIM 기본값으로 설정하였으며, 자율주행차의 속도분포는 도심부도로 속도기준인 50km/h로 설정하였다. 시뮬레이션 시간은 7,200초로 설정하였으며, 시뮬레이션 초반 차량진입시간(Warm-up time) 3,600초를 제외하고 3,601초에서 7,200초의 분석결과값을 10회 분석한 평균값을 결과로 활용하였다. 평가지표는 도로네트워크의 효율성과 안전성으로 구분하였다. 도로효율성 평가지표로는 구간별 링크의 평균밀도, 지체, 속도, 교통량, 교차로의 평균 연료소모량, 차량지연, 대기열길이이며, 안전성 지표는 총 상충건수와 유입교통량 대비 상충건수를 선정하였다. 선정된 평가지표는 Table 2와 같다.
Table 1.
Parameter settings for the VISSIM
Table 2.
Evaluation criteria
상충분석은 SSAM(Surrogate Safety Assessment Model)을 활용하였으며, 이는 상충이론을 기반으로 VISSIM에서 생성한 개별차량 경로데이터를 활용해 상충의 발생을 분석하는 소프트웨어이다(Yoon et al., 2011). 상충분석을 위한 안전척도(Surrogate measure)는 가장 많이 활용되고 있는 TTC(Time to Collision)와 PET(Post Encroachment Time)를 선정하였다. TTC는 두차량이 현재속도와 동일한 경로로 진행될 경우 상충까지 예상되는 시간을 계산한 값으로, TTC값이 낮을수록 충돌확률이 높으며 1.5초 이하일 경우 심각한 상충이 예상된다. PET는 선행차량이 도로위의 어떤 지점을 마지막으로 점유했던 시점과 후속차량이 같은 위치에 도착한 시점 사이의 시간으로 PET값이 클수록 충돌확률이 높아진다. 본 연구의 상충분석을 위한 지표기준은 TTC는 1.5초 이하, PET는 5.0초 이하를 상충으로 정의하여 분석하였다. 그리고 지점별 상충데이터를 시각화 하기 위해 파이선 3.0을 이용하여 프로그램을 개발하고 시행하였다. 시뮬레이션 분석흐름도는 Figure 4와 같다.
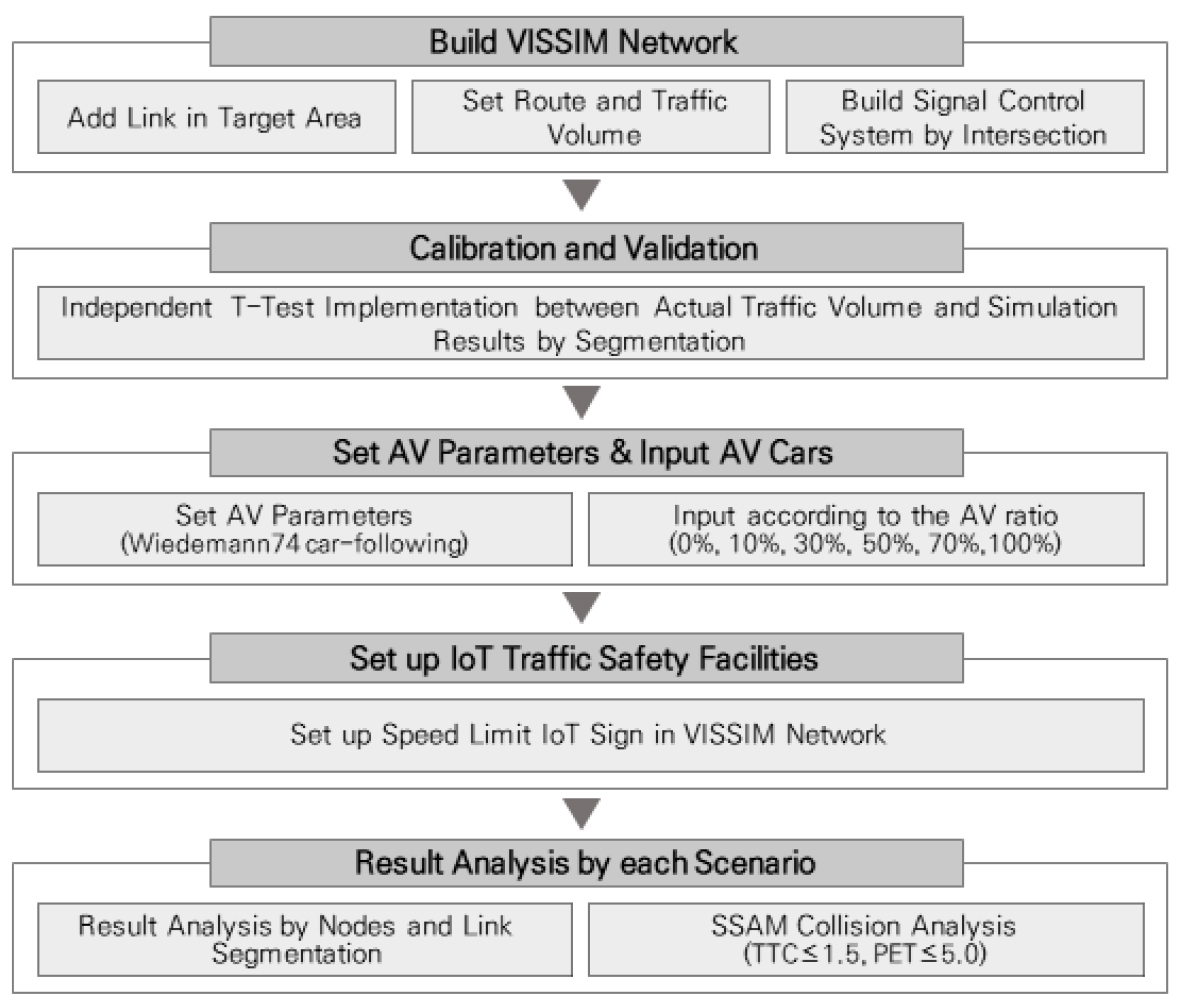
본 연구는 IoT교통안전시설을 설치하였을 경우와 설치하지 않았을 경우에 대해 자율주행차 도입비율에 따라 도로효율성과 안전성이 개선되는지 평가하는데 목적이 있다. 도심부도로인 대상지역의 속도는 50km/h이며, 이 상황을 IoT교통안전시설이 설치하지 않았을 경우로 정의하였다. 일반차량은 속도제한표지를 운전자가 직접 인식하며, 자율주행차는 통신기반 IoT교통안전시설로 속도제한표지를 인식할 수 있다. VISSM에서 차량에게 속도제한정보를 제공하는 방법은 COM Interface를 활용하는 방법과, 속도감속구간(reduced area)를 활용하는 방법이 있다. 두 방법을 모두 적용해본 결과 도로네트워크에 주는 효과가 동일한 것으로 나타나, 본 연구에서는 속도감속구간(reduced area)의 기능으로 자율주행차가 IoT교통안전시설을 인식한다고 가정하였으며, 이때를 IoT교통안전시설이 있다고 정의하고 비교평가하였다. 또한 IoT교통안전시설은 LoRa통신을 기반으로, 현장에서는 300m 반경의 자율주행차에게 표지정보를 제공하고 있으며, 자율주행차의 제동거리는 300m 이내에서 설정할 수 있다. 본 연구는 VISSIM으로 구현한 분석 대상지 네트워크의 도로구간 거리를 고려하여 속도제한표지의 100m전방을 30km/h 감속구간(reduced area)으로 설정해 차량에게 속도제한정보를 제공하였으며, 자율주행차 도입비율은 6단계(0%, 10%, 30%, 50%, 70%, 100%)로 구분해 분석하였다. 분석시나리오는 Table 3에 제시하였다.
분석결과
시나리오를 분석을 위해 VISSIM 네트워크에 실제 구간별 교통량을 입력하였으며, 입력한 구간별 교통량 현황과 시뮬레이션 후 구간별 교통량 결과값이 차이가 있는지 검정하기 위해 통계프로그램 SPSS 21.0을 활용한 독립표본 t-검정을 수행하였다. 분석결과는 Table 4와 같다. VISSIM 네트워크의 구간별 교통량 현황은 평일 오전첨두(08:00-09:00) 시간대 현장조사자료(Cheil Engineering, 2019)를 활용하였다. 분석결과, Levene 등분산 검정의 유의확률이 0.05 이상으로 등분산이 가정되며, t검정 유의확률이 0.05 이상으로 차이가 있다는 귀무가설을 기각하지 않아 입력한 구간별 교통량과 분석된 구간별 교통량은 통계적으로 차이가 있다고 할 수 없다. 따라서 구축한 시뮬레이션 네트워크가 현황의 교통환경을 반영한다고 판단하고 시뮬레이션을 수행하였다.
Table 4.
Independent sample t-test at volume
1. 시나리오: 자율주행차 도입비율에 따른 결과
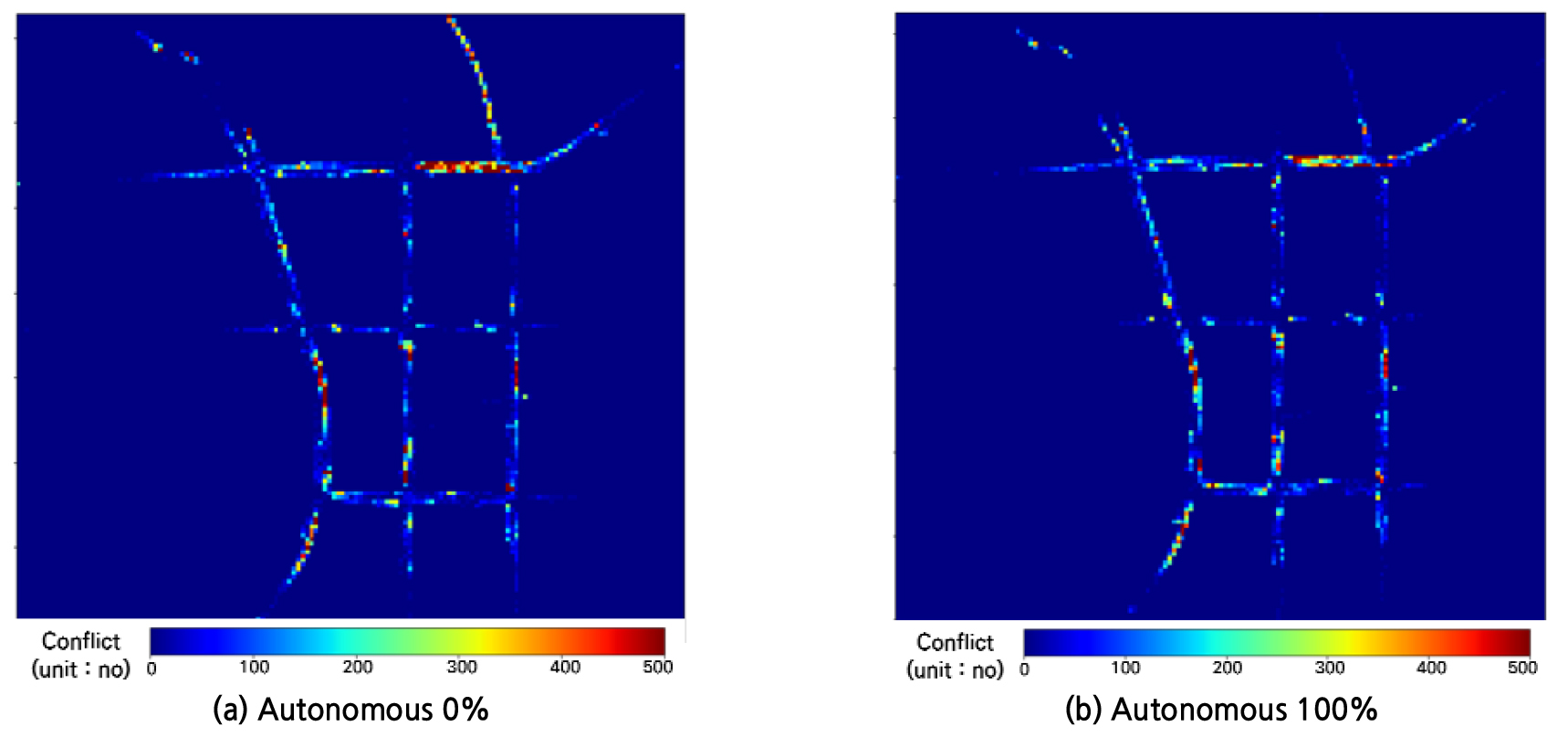
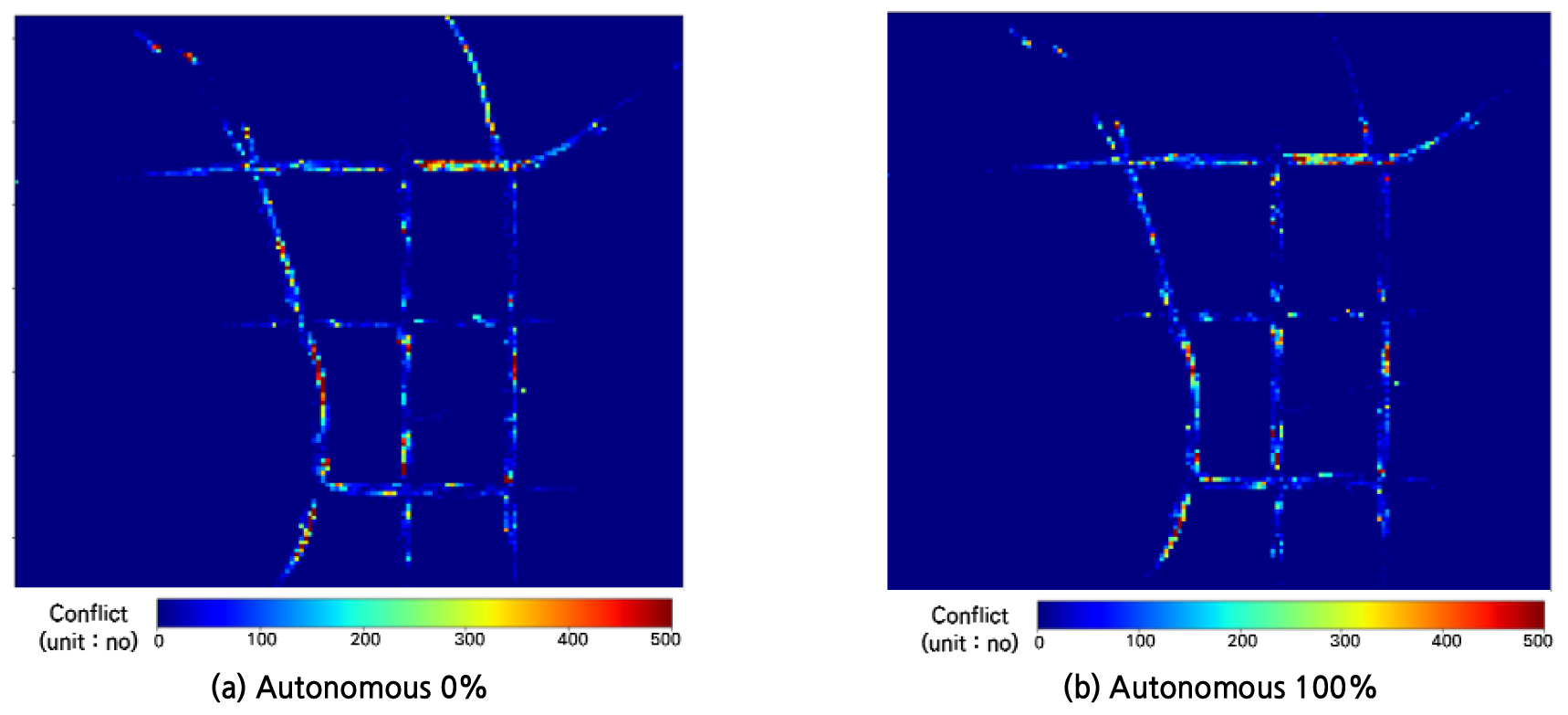
자율주행차 도입비율에 따른 링크 및 노드의 평균개선율을 Tables 5, 6과 같이 살펴보면, 자율주행차 도입비율이 높아질수록 링크의 밀도, 지체, 교통량이 개선되었으며, 노드의 연료소모량, 차량지연, 대기열길이가 개선된 것으로 분석되었다. 특히 자율주행차가 100% 도입되었을 때 자율주행차 0% 대비 링크의 지체는 31.2% 개선되었으며, 노드의 대기열길이는 31.7% 개선된 것으로 분석되었다. 또한 링크의 밀도와 교통량, 노드의 차량지연과 대기열길이에서 자율주행차 혼입비율이 50%일 때, 자율주행차 혼입비율이 30%일 때 보다 개선율이 낮았으나 0%일 때 보다는 도로 효율성이 개선된 것으로 분석되었다. 반면 속도는 자율주행차 도입비율이 증가할수록 개선되지 않았는데, 이는 도심부도로인 분석대상지의 교통량이 포화상태이며, 자율주행차 속도분포를 도심부 속도제한인 50km/h로 고정했기 때문으로 판단된다. 자율주행차 도입비율별 상충결과는 Table 7과 같으며, 자율주행차 도입비율이 높아질수록 상충수가 감소하는 것으로 나타났다. 자율주행차 도입비율이 100%일때 최대 14.5% 개선되는 것으로 나타났다. Figure 5는 자율주행차 도입비율의 0%와 100%의 네트워크에서 발생하는 상충건수를 색으로 나눈것인데 자율주행차 도입비율이 0%에서 100%로 변화했을 때 네트워크의 오른쪽 상단의 400건에서 500건 사이의 상충이 감소하는 것을 확인할 수 있다.
Table 5.
Result of scenario 1 - improvement rate of traffic flows upon links
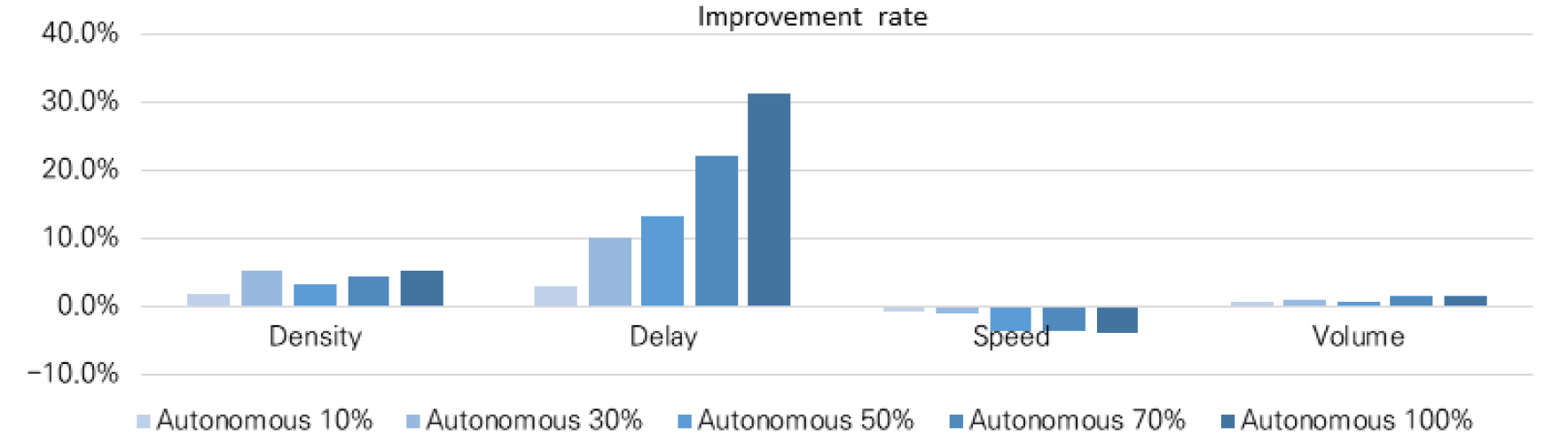
Table 6.
Result of scenario 1 - improvement rate of traffic flows upon nodes
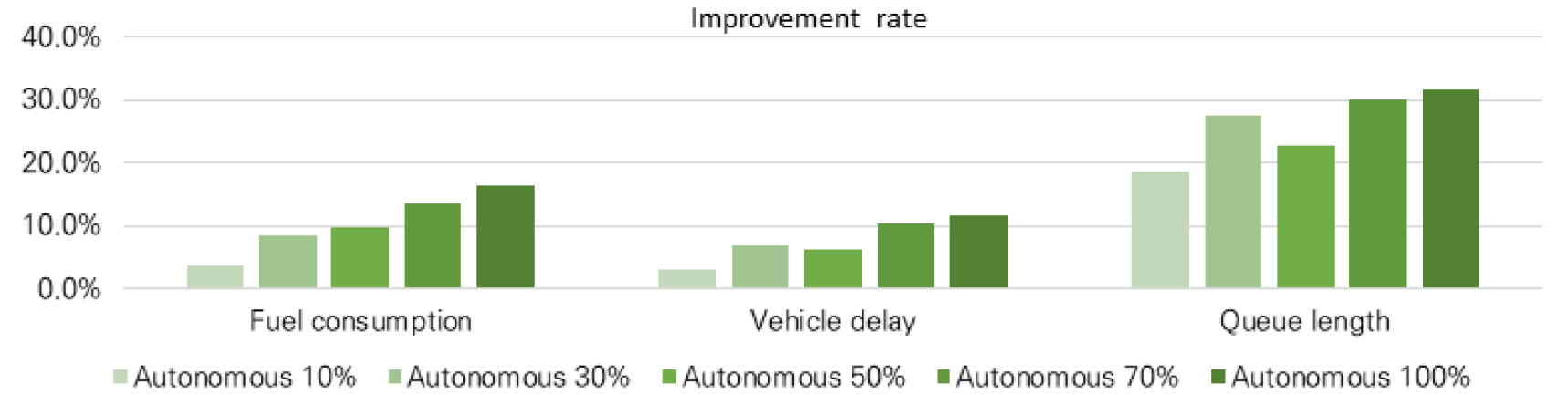
Table 7.
Result of scenario 1 - change of the number of conflicts
2. 시나리오: IoT 교통안전시설이 있을 때, 자율주행차 도입비율에 따른 결과
도로상에 IoT 교통안전시설이 있을 때, 자율주행차 도입비율에 따른 링크 및 노드의 평균개선율을 Tables 8, 9와 같이 살펴보면, 자율주행차 도입비율이 높아질수록 링크의 밀도, 지체, 교통량이 개선되었으며, 노드의 연료소모량, 차량지연, 대기열길이가 개선되었다. 특히 자율주행차가 100% 도입되었을 때 링크의 지체는 26.9% 개선되었으며, 노드의 대기열길이는 29.1% 개선된 것으로 분석되었다. 반면 링크의 교통량, 노드의 대기열길이는 시나리오 1과 같이 자율주행차 혼입비율이 50%였을 때 자율주행차 혼입비율이 30%였을 때 보다 개선율이 낮게 나타났다. IoT 교통안전시설이 있을 때 자율주행차 도입비율별 상충결과는 Table 10과 같으며, 자율주행차 도입비율이 높아질수록 상충수가 감소하는 것으로 나타났다. 자율주행차 도입비율이 100%일 때 최대 16.5% 개선되는 것으로 나타났다. 역시 앞의 시나리오1과 같이 시나리오2에서도 네트워크 왼쪽 상단의 상충건수가 감소하는 것을 Figure 6에서 확인할 수 있다.
Table 8.
Result of scenario 2 - improvement rate of traffic flows upon links
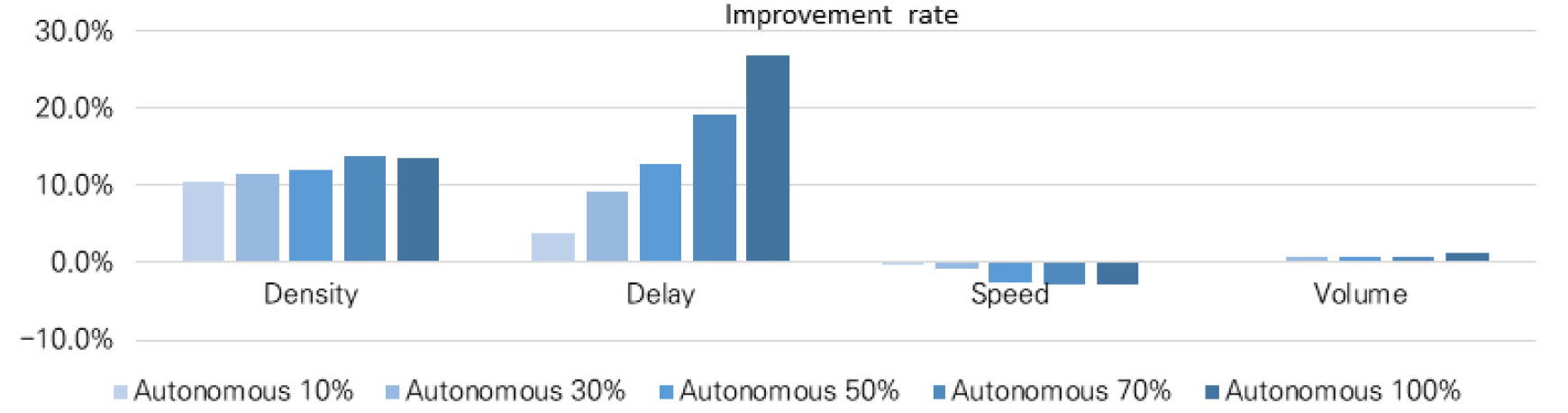
Table 9.
Result of scenario 2 - improvement rate of traffic flows upon nodes
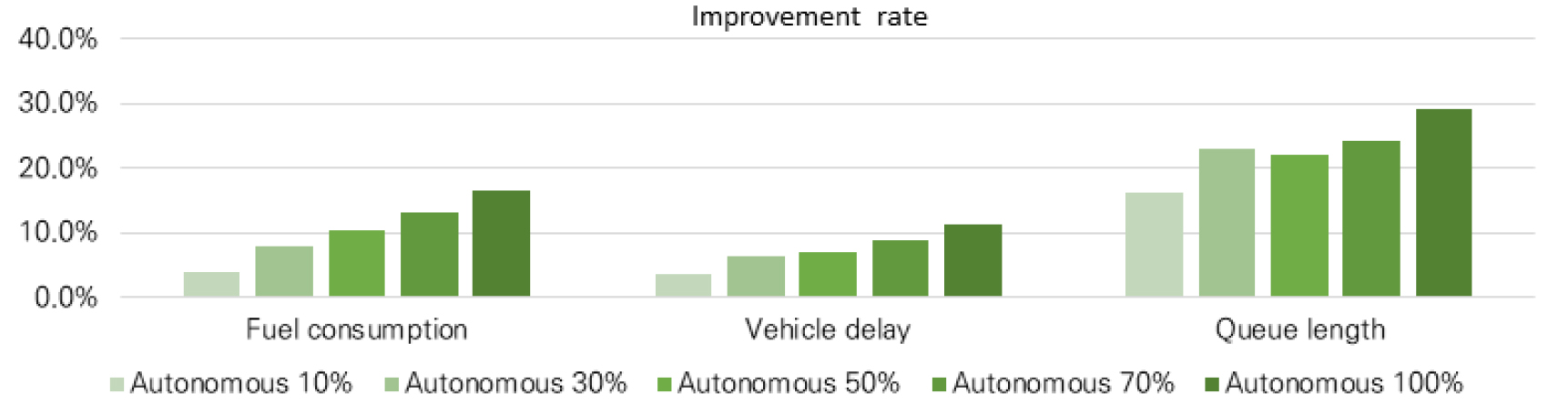
Table 10.
Result of scenario 2 - change of the number of conflicts
3. 비교분석
IoT 교통안전시설 유무에 따른 자율주행차 도입비율별 상충결과는 Table 11에 제시하였다. IoT 교통안전시설로 속도제한표지가 없을 때와 있을 때 모두 자율주행차 비율이 높아질수록 상충건수가 감소하였으며, 차량1대당 상충건수가 감소하는 것으로 나타났다. 이는 자율주행차는 일반차량에 비해 돌발상황 발생시 사람의 일반적인 인지반응시간보다 빠르게 반응하기 때문에 상충을 피할가능성이 높기 때문이다(Yang, 2017). 또한 속도제한 IoT 교통안전시설이 있을 경우가 없을 경우에 비해 상충건수가 적었으며, 차량1대당 상충건수도 더 적은 것으로 분석되었다. 이는 속도제한으로 구간속도가 낮아지며, 상충건수가 감소한 것으로 판단된다. SSAM에서는 선행차량과 후행차량의 상충각도에 따라 상충각도가 30° 미만인 경우 후미추돌, 30° 이상 85° 이하인 경우 차로변경상충, 85° 이상인 경우 교차충돌로 산정한다. IoT 교통안전시설 유무에 따른 상충유형별 분석결과는 Table 12에 제시하였다. IoT 교통안전시설이 있을 때와 없을 때 모두 상충의 약 70%는 후미추돌, 25%는 차로변경상충, 5%는 교차충돌로 나타났다. 앞서 IoT 교통안전시설이 있을 경우가 IoT 교통안전시설이 없을 경우에 비해 상충건수가 줄어들었다. 자율주행차 비율 10% 이하인 경우에는 후미추돌의 감소율이 다른 상충유형에 비해 컸으며 자율주행차 비율이 30% 이상으로 높아질수록 차선변경상충의 감소율이 더 커졌다. 그러나 교차충돌에 대해서는 일정패턴을 발견하기 어려웠다.
Table 11.
Impact of IoT traffic control devices on the total number of conflicts
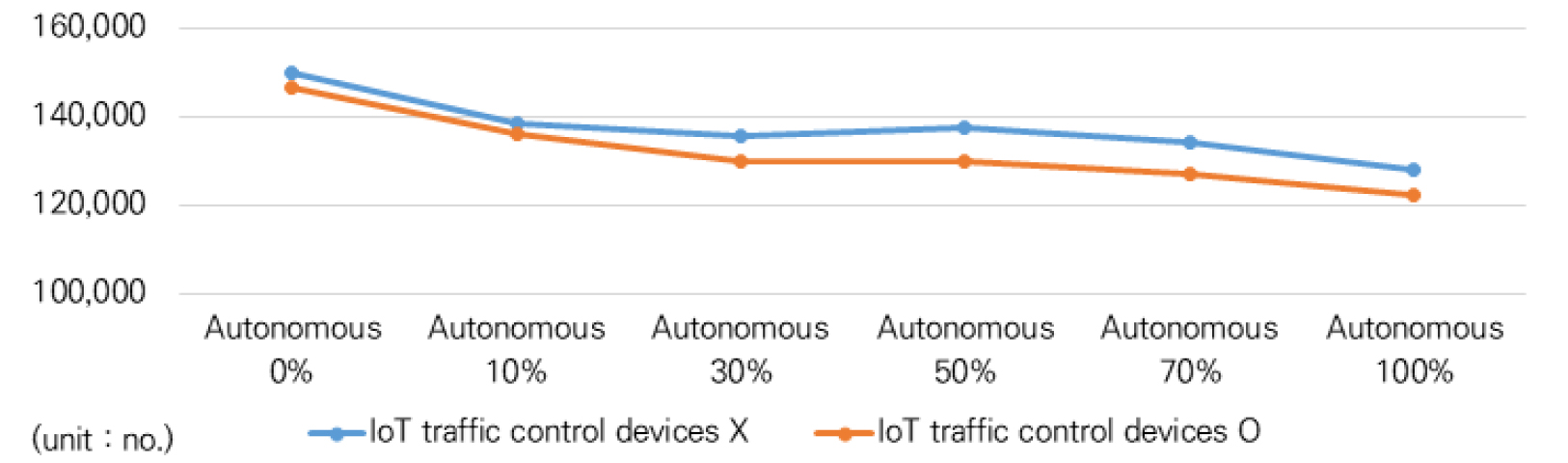
Table 12.
Impact of IoT traffic control devices by conflict types
결론
본 연구는 자율주행차 운행환경에서 반드시 필요한 교통안전시설의 개발과 그 효과를 분석하는 방법론을 개발하는데 목적이 있다. 자율주행차가 통신으로 규제정보를 인식할 수 있는 IoT 교통안전시설을 도심환경도로에 설치하였을 때 도로네트워크의 효율성과 안전성이 어떻게 변화하는지 미시적 교통시뮬레이션 프로그램인 VISSIM을 활용해 평가하였다. 분석대상지는 경찰청 「IoT 기반 교통안전시설 정보제공 및 운영관리 기술개발 사업(3과제)」의 IoT 교통안전시설 실증대상지인 판교 자율주행시범운행지구를 대상으로 하였으며, 미시적 교통시뮬레이션 프로그램 VISSIM을 활용해 IoT 교통안전시설 유무에 따라 자율주행차 운행비율을 달리하였을 때 자율주행차에 보내는 속도제한 등 규제정보에 따라 도로상의 효율성과 안전성이 어떻게 개선되는지 평가하였다.
분석방법은 첫째, VISSIM을 활용해 분석대상지 도로구현, 구간별 교통량 및 경로설정, 신호현시구현 등 네트워크를 구축하였다. 둘째, 네트워크에 입력한 구간별 교통량 현황과 시뮬레이션 분석을 통해 도출된 구간별 교통량이 차이가 있는지를 분석하기 위해 독립표본 t검정을 실시하여 시뮬레이션의 교통환경이 현실을 반영할 수 있는 근거를 만들었다. 셋째, 자율주행차의 운행행태를 반영하기 위해 차량추종모형 중 단속류모형(Wiedemann74 car-following)을 활용해 자율주행차의 파라미터를 조정하여 현황도 반영하고 자율주행차 도입비율에 따른 결과를 검토하였다. 넷째, 대상지에 설치된 IoT 교통안전시설 중 11개의 속도제한표지를 시뮬레이션에 반영하였으며, 운전자의 가시거리, 교차로 길이 등을 고려해 실제 대상지에 설치된 속도제한표지 설치지점의 100m이전부터 30km/h 감속구간(reduced area)으로 설정해 차량이 속도를 감속할 수 있도록 설정하였다. 다섯째, 분석시나리오에 따라 IoT 교통안전시설을 설치하였을 경우와 설치하지 않았을 경우에 대해 자율주행차 도입비율(0%, 10%, 30%, 50%, 70%, 100%)에 따라 구간별 링크의 밀도, 지체, 속도, 교통량, 상충이 개선되는지, 교차로 연료소모량, 차량지연, 대기열길이를 평가하고, SSAM을 활용해 시나리오별 상충분석을 실시함으로써 자율주행차 도입비율에 따른 도로네트워크의 효율성과 안전성이 어떻게 개선되는지 분석하였다.
결론적으로 시나리오 1은 IoT 교통안전시설이 없을 때 자율주행차 도입비율에 따라 네트워크가 어떻게 변화하는지 분석하였는데, 분석결과 자율주행차 도입비율이 높아질수록 링크의 밀도, 지체, 교통량이 개선되었으며, 노드의 연료소모량, 차량지연, 대기열길이가 개선된 것으로 분석되었다. 특히 자율주행차가 100% 도입되었을 때 자율주행차 0% 대비 링크의 지체는 31.2% 개선되었으며, 노드의 대기열길이는 31.7% 개선된 것으로 분석되었다. 또한 자율주행차 도입비율이 높아질수록 상충수가 감소하는 것으로 나타났으며, 자율주행차 도입비율이 100%일 때 상충이 14.5% 개선되는 것으로 나타났다. 이는 연속류에서 자율주행차도입에 따른 도로네트워크 환경이 개선되는 기존연구를 다시 한번 확인해 주는 결과이다.
시나리오 2는 IoT 교통안전시설이 있을 때 자율주행차 도입비율에 따라 네트워크가 어떻게 변화하는지 분석하였는데, 분석결과 자율주행차 도입비율이 높아질수록 링크의 밀도, 지체, 교통량, 노드의 연료소모량, 차량지연, 대기열길이가 개선되었다. 특히 자율주행차가 100% 도입되었을 때 링크의 지체는 26.9% 개선되었으며, 노드의 대기열길이는 29.1% 개선된 것으로 분석되었다. 또한 자율주행차 도입비율이 높아질수록 상충수가 감소하는 것으로 나타났으며, 자율주행차 도입비율이 100%일 때 상충이 16.5% 개선되는 것으로 나타났다. 시나리오 2는 속도제한표지를 설치했기 때문에, 시나리오 1에 비해 링크와 노드의 효율성이 개선되지는 않았으나, 총 상충건수와 차량1대가 경험하는 상충건수는 시나리오 2가 더 개선된 것으로 분석되었다. 이는 속도제한 정보로 인해 구간의 속도가 규칙적으로 감소하였으며 결론적으로 상충건수에 영향을 준 것으로 판단된다. 시나리오 1과 2 모두 자율주행차 비율이 높아질수록 상충건수 및 차량1대가 경험하는 상충건수가 감소하는 것으로 나타났다.
IoT교통안전시설은 경찰청 교통안전시설 규제심의 통과후 향후 교통안전시설의 하나로 설치되어 자율주행차량 운행의 안전성을 강화할 것이다. 「IoT 기반 교통안전시설 정보제공 및 운영관리 기술개발 사업(3과제)」은 패스트트랙의 일환으로 수행되었으나, 우리나라 전체에 설치하고 운영되기 위해서는 설치방법과 위치 등의 구체적인 매뉴얼이 필요하다. 자율주행차가 앞으로 몇 년 안에는 일반차와 혼재되어 교차로가 있는 도심부에서 운행할 것인데 자율주행차가 안전하게 운행되기 위해서는 도로상의 주행규제정보를 제공하는 IoT교통안전시설 설치와 보급이 시급하다. 본 연구는 IoT교통안전시설이 실제 도로상에 설치되었을 때 효과평가로써 자율주행차 도입 비율에 따라 도로안전성과 효율성을 평가하여 개선되는 결과를 보여줌으로써 IoT교통안전시설 설치보급의 근거가 되는 기초연구로써 의미가 있다. 또한 향후 연구과제로 다음과 같은 내용을 다룰 수 있을 것이다. 첫째, 종합적으로는 자율주행차 도입비율이 높은 경우 낮은경우에 비해 도심부도로 네트워크 효율성과 안전성 측면에서 개선율이 더 높은 것으로 나타났으나, 자율주행차 도입비율이 증가할수록 도로 효율이 비례적으로 개선되지는 않았다. 이는 본 연구의 분석대상지가 도심부 단속류도로이기 때문에 신호, 교차로 운영 등 교통류 흐름에 다양한 영향들이 반영된 것으로 판단되며, 향후 파라미터 조정등을 통해 영향요인을 파악할 필요가 있다. 둘째, 본 연구에서는 자율주행차의 V2V에 대한 기술은 고려하지 않았다. 앞으로 자율주행차량이 V2V통신을 이용하여 선두에 있던 차량이 받은 교통안전시설 정보를 추종주행하는 다른 자율주행차에게 전달할 수 있을 것이다. 이는 도로네트워크의 효율성과 안전성에도 영향을 미칠 것이다. 이와 같이 자율주행환경에서 일어날 수 있는 다양한 기술을 적용하여 도로네트워크 평가연구가 후속연구로 필요하다. 이러한 내용을 다룰 수 있는 시뮬레이션 역시 추가로 개발되어야 할 것이다. 본 연구에서 활용한 VISSIM은 이러한 자율주행환경의 네트워크를 반영하기에는 한계가 있다. 본 연구에서는 IoT교통안전시설 속도제한으로 VISSIM의 한 기능인 속도감속 구간(reduced area)을 활용하였고 결과를 도출하기 위하여 파이썬 3.0을 활용하였다. 이와 같이 자율주행환경의 다양한 기능을 고려한 효과분석이 필요할 것이다.
